سؤال وجواب مع خبير روبوتيات
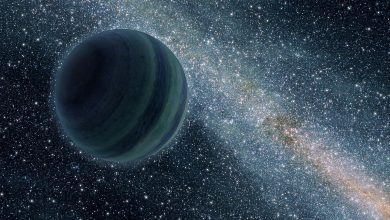
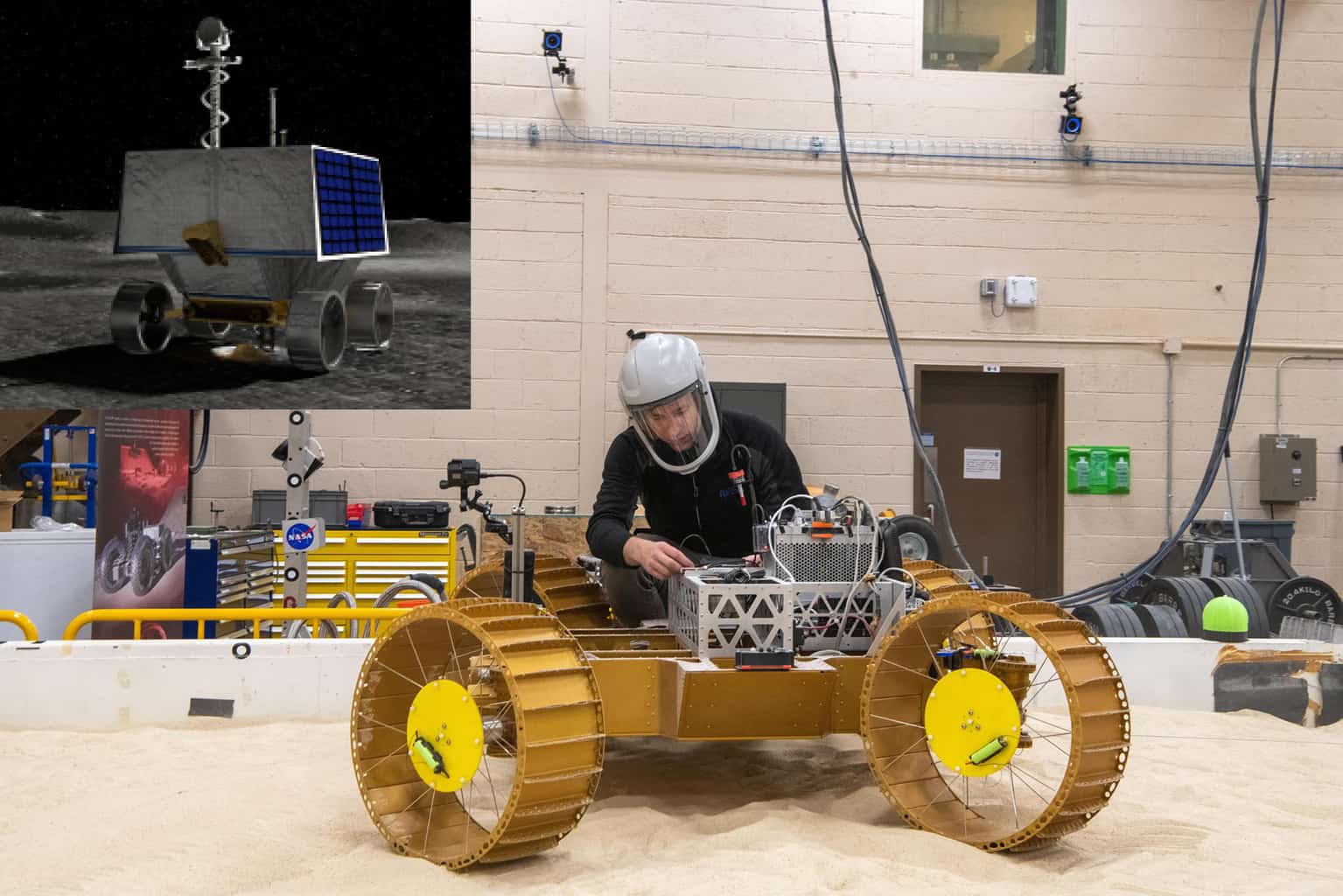
بعد سنوات من الاختبارات المدققة، بدأت ناسا بناء جوالتها القمرية فايبر VIPER التي ستبحث عن الجليد وعناصر محتملة أخرى على القطب الجنوبي للقمر
إيزي بارسن تقابل د. تيري فونغ
ما دورك في مركز أبحاث آميس؟
أعمل على أبحاث وتطوير تكنولوجيا الروبوتيات للوكالة ناسا. يوجد هنا فريق R&D كبير في مركز أبحاث آميس التابع للوكالة ناسا، معظمهم يعمل على بعثة الجوالة القمرية VIPER التي ستذهب لتعمل بالقرب من منطقة القطب الجنوبي للقمر. لقد أنجزنا كثيراً من الأبحاث في الماضي على الجوالات الكوكبية، وأخذنا هذه إلى حقل العمل لنطور طرقاً وتكنولوجيات جديدة لمهمات الكواكب المستقبلية.
لماذا يُعَد اختبار المركبات الجوالة مهماً؟
هناك مقولة سائدة في الوكالة ناسا عن هندسة المهمات الفضائية: ”اختبِرْ لأنك ستطير“. نحن نريد اختبار منظوماتنا بأكثر طريقة واقعية، وأعلاها موثوقية، بحيث لا نُفاجَأ عندما نرسل جوالة روبوتية من ولاية كاليفورنيا المشمسة إلى القمر البارد. من الواضح أنه توجد هناك حدود، لكننا نحاول اختبار الجوالة تحت ذلك النوع من الظروف التي نتوقع لها أن تعمل فيها.
ما الاختبارات التي ينبغي أن تجتازها الجوالة VIPER القمرية؟
أحد الأمور التي نهتم بها كثيراً بشأن الجوالة VIPER هو أنها ذاهبة للعمل قرب القطب الجنوبي للقمر. وهذا مكان يسقط عليه ضوء الشمس بزاوية منخفضة جداً، على الأكثر 5° 10° فوق الأفق. وظلال التضاريس هناك تبدو طويلة جداً – الأمر سيكون أشبه بالتجوال في وقت غروب الشمس. أحد الأمور التي نختبرها هو كيف ستعمل منظومات الكاميرات هناك. وفي مثال الجوالة VIPER، فهذه أول جوالة تتمتع بمصابيح إضاءة على الإطلاق، ولذا نريد معرفة كيف ستعمل تحت تلك الظروف مع تربة القمر؟
كيف يمكن لتربة القمر أن تؤثر في رؤية الجوالة VIPER؟
تربة القمر لها هذه الخاصية المثيرة جداً: إذا كنتَ تنظر مباشرة تحت الشمس – أي، الشمس من خلفك – فسترى أن أرضيته لا تبدو متجانسة. تعمل حبيبات رمال القمر مثل عاكسات صغيرة، لترسم شكل الضوء، وينتهي بها الأمر بصورة أكثر سطوعاً في المركز. ولهذا تأثير حقيقي في الطريقة التي نطور بها خوارزميات كاميراتنا وخوارزميات معالجة صورها. لدينا موقع اختبار صخري نستخدمه لمحاكاة الظروف التي ستبدو عليها التربة. نستعمل محاكيات شمسية، هي مجموعة ساطعة من مصابيح LED ضُبطت لتحاكي سطوع الشمس ونمط شعاعها.
كيف تختبر حركة الجوالة في الموقع؟
هناك مختبرات أخرى، مثل مختبر SLOPE (اختصاراً لـ عمليات المحاكاة القمرية Simulated Lunar OPErations) في مركز أبحاث غلن Glenn Research Center، وهو يركز على الخصائص الميكانيكية للتربة، مثل كيف تتفاعل آلات ميكانيكية مثل الدواليب مع التربة. لقد استكملنا عدداً من الاختبارات على قيادة الجوالة VIPER في مختبر SLOPE لكي ندرك كيف تتعامل العجلات مع التربة على منحدرات مختلفة. ثمة قلق من أننا لم نفهم جميع الاحتمالات التي يمكن لطبيعة الأرضية والتربة أن تأخذها. هل هي شديدة الصلابة أو شديدة النعومة؟ هل يمكننا تدوير عجلات جوالتنا؟ وأن نتشبث بالموقع من دون أن تُقذَف الجوالة بعيداً؟ لقد طورنا عدة طرق يمكننا استخدامها لتحرير الجوالة من العوائق.
ما هذه الطرق؟
الجوالة VIPER تختلف عن جوالات الوكالة ناسا السابقة في أن نظام تعليقها Suspension يتصل بالمحركات، ولذا نستطيع في الواقع تنظيم عمل الجوالة الآلية بطريقة مختلفة ونرفع كل عجلة بنحو مستقل. نستطيع بصورة رئيسة تدوير العجلات. وأيضاً، يمكننا تغيير زاوية العجلة بحيث يمكننا السباحة، مثل السباحة الصدرية، عبر التربة. هذه طرق طورناها واختبرناها لكي نواجه المخاطر التي قد نضع أنفسنا فيها من دون أن نكون قادرين على الخروج منها بمجرد القيادة.
 تيري فونغ Terry Fong:
تيري فونغ Terry Fong:كبير خبراء الروبوتيات في مركز أبحاث آميس التابع للوكالة ناسا، وهو يعمل على بعثة الجوالة VIPER
قبل نحو شهرين، بدأنا صنع مركبة التحليق في مركز جونسون الفضائي التابع للوكالة ناسا في هيوستن. ونحن الآن نتنقل من التطوير والتصنيع إلى التدريب على العمليات، وقد بدأنا البحث في كيف يمكنك تشغيل الجوالة من بُعد. يبلغ وقت الاتصال، ذهاباً وإياباً، نحو 6 إلى 10 ثوانٍ في الوقت الذي تصل فيه البيانات إلى الشبكات الأرضية وصولاً إلى مركز التحكم في البعثة. لا يتحقق ذلك في الزمن الفعلي. فنحن سنرسل مجموعة من الأوامر، ثم ننتظر تنفيذها من قِبَل الجوالة، وإرسال تقريرها لنا عن الشيء الذي أنجزته. بالنسبة إلى الجوالة VIPER، هدفنا هو أن نفعل هذا كل 4 دقائق. إنه عمل تفاعلي جداً. لدينا عالِم كواكب يعمل كأحد الأشخاص الذين يشغلون الجوالة فعلاً، وهذا أمر لم تفعله ناسا من قبل.